Nanomedicine, Volume IIA: Biocompatibility
© 2003 Robert A. Freitas Jr. All Rights Reserved.
Robert A. Freitas Jr., Nanomedicine, Volume IIA: Biocompatibility, Landes Bioscience, Georgetown, TX, 2003
15.5.4.3 Size and Force Threshold for Perceptible Histonatation
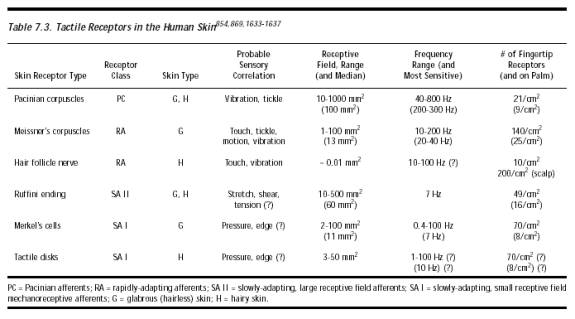
Individual nanorobots smaller than ~100 microns in largest dimension are unlikely to cause perceptible sensations during histonatation if physical disturbance of neural cells is avoided and if the passage through tissue does not produce an enlarged or displaced peridermal tissue volume (e.g., via direct mechanical distension or indirectly from edema) sufficient to (1) activate dermal pressure or vibration sensors, stretch receptors, or dermal nociceptors each of which may lie 500-3000 microns from their nearest neighbor (Table 7.3); or (2) to activate vascular stretch sensors or barosensors. Pain has been reported [2086] possibly caused by numerous small insoluble crystals in the renal tubules, a crude nanorobot analog. But motile biological cells such as neutrophils (random motility coefficient 1.6-13.3 x 10-13 m2/sec) [4014], T cells [4015], dendritic cells [4016], fibroblasts (tissue transits at 15-55 microns/hour) [4017], hematopoietic progenitor cells [4018], human mast cells [4019], brain macrophages [4020], and tissue macrophages [4021] (up to 80 microns in diameter) regularly ply human tissues completely imperceptibly and without pain, though at modest speeds, typically 0.01-0.7 micron/sec (Section 9.4.4.2).
Inertial and viscous shear forces generated by a single nanorobot of size L ~ 100 µm moving at velocity v ~ 100 micron/sec through a medium of density rho ~ 1000 kg/m3 and viscosity eta ~ 10-3 kg/m-sec is Pinertial = Finertial / L2 ~ rho v2 ~ 0.00001 N/m2 and Pviscous = Fviscous / L2 ~ eta v / L ~ 0.001 N/m2, respectively (Section 9.4.2.1). Both figures are well below the ~2900 N/m2 threshold for first sensation during esophageal wall distension [3702], or the esthesiometer-measured [4022] minimum epidermal stimulus threshold of ~2000 N/m2, or even the shear stress activation thresholds for living cells of ~1 N/m2 (Section 15.5.3.1.1 and 15.5.4.1). However, simultaneous passage of more than a thousand 100-micron nanorobots through the receptive field of an individual skin sensor (~1-1000 mm3, assuming 1 mm depth; Table 7.3) could elicit some biological response, and the passage of >106 of these large nanorobots through the same tissue volume could become perceptible to the patient. Viscous pressure scales inversely with L, so for 1-micron nanorobots the threshold perceptible number density may be as high as 0.1-100 million nanorobots/mm3, but these figures are little better than crude estimates. Direct experiments will be required to resolve the question.
Last updated on 30 April 2004
{kind=link}